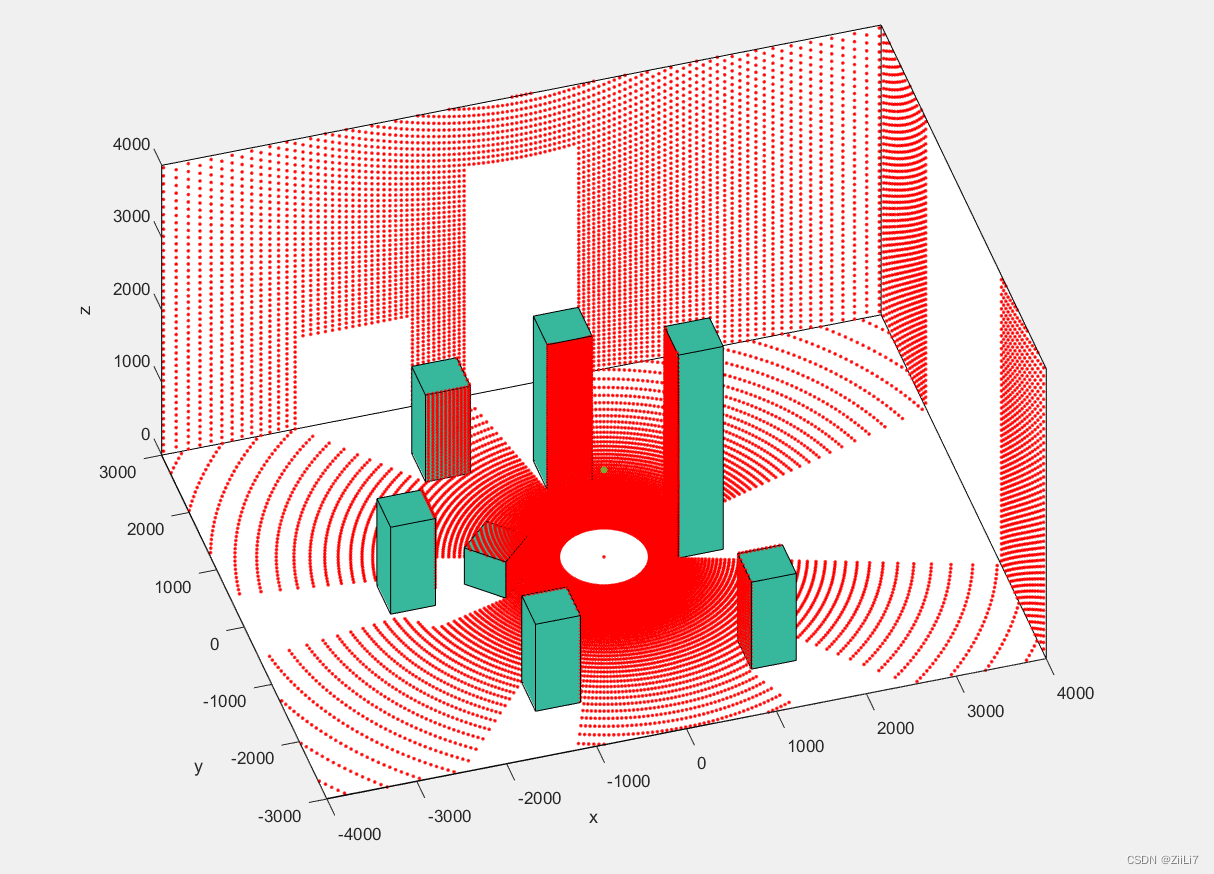
This article provides a simulation environment for modeling laser beams hitting object surfaces and the ground. Users can configure the laser range, resolution, object position, size, and rotation.
Recently, we needed to analyze occlusions caused by objects in a laser scanner's background. Unable to find a suitable environment, we built one in MATLAB.
The principle is straightforward, but there are many details to handle. What was expected to take a day ended up taking three days of debugging.
Adhering to a "if it works, don't fix it" philosophy, the code hasn't been thoroughly tested and has minor bugs. For instance, objects closer to the scanner must be loaded first, and the laser source should not be inside an object.
Another post shows a program for calculating scanned coverage area: Simple Physics Engine — Estimating Laser Scan Coverage Area with MATLAB
Implementation Flow
- Generate Laser Beams: Create beams with specified angular range and resolution at a given position and orientation.
- Create Cuboids: Based on input position and size, generate cuboids in space, compute their 8 vertices, and derive gemoetric information for each of the 6 faces.
- Calculate Intersections: For each laser beam, find intersections with all planes of all cuboids. Note: A single beam may intersect two planes of a cuboid; keep only the closest point to the source. Also, collinear but opposite-direction beams may be generated; keep only those pointing toward the cuboid by checking the angle between the beam direction and the plane normal.
- Mark beams that hit an object; they are excluded from subsequent iterations.
- Background Intersections: Beams that did not hit any object are used to compute intersections with the background.
- Plotting: Visualize results. (Coverage area calculation is covered in another post.)
MATLAB Implementation
Main Program: Environment_Main.m
clc; clear;
% Basic parameters
% Scanner settings
lidar.Location = [0 0 1200]; % Scanner origin
lidar.Rotation = [0 0 0]; % RPY rotation angles
horizontalStep = 1; verticalStep = 1; % Step angles for elevation and azimuth
% Room dimensions
roomX = 8000; roomY = 6000; roomZ = 4000;
% Plot settings
axis equal;
axis([-roomX/2, roomX/2, -roomY/2, roomY/2, 0, roomZ]);
hold on; grid on;
xlabel('x'); ylabel('y'); zlabel('z');
% Generate laser beams
lidar.laserCount = 0;
laserPoints = zeros((360/verticalStep)*(360/horizontalStep), 3);
for elev = -90:horizontalStep:68 % Elevation angle
for azim = -180:verticalStep:180
lidar.laserCount = lidar.laserCount + 1;
c = 0;
RA = baseRotateMatrix(elev, azim, c);
laser_point = RA * [100 0 0]';
laserPoints(lidar.laserCount, :) = laser_point';
end
end
lidar.Directions = laserPoints(1:lidar.laserCount, :); % Direction vectors
lidar.Directions = (baseRotateMatrix(lidar.Rotation(1), lidar.Rotation(2), lidar.Rotation(3)) * lidar.Directions')';
lidar.Flag = ones(lidar.laserCount, 1); % Ray flags: 1 = not yet hit object
lidar.Lasers = lidar.Directions + lidar.Location; % Ray lines
% scatter3(lidar.Lasers(:,1), lidar.Lasers(:,2), lidar.Lasers(:,3), '.');
% Add objects here
% Cuboid-------------------------------------------------------------------
cube.scale = [500, 500, 2800];
cube.Location = [1000, 0, cube.scale(3)/2];
cube.Rotation = [0, 0, 0];
cube_output = Environment_Driver_Box_Create(cube);
Environment_Driver_Box_Screen(cube_output);
lidar.Flag = Environment_Driver_Cube_Line(lidar, cube_output);
% Cuboid-------------------------------------------------------------------
cube.scale = [500, 500, 500];
cube.Location = [-1200, 0, cube.scale(3)/2];
cube.Rotation = [0, 0, 45];
cube_output = Environment_Driver_Box_Create(cube);
Environment_Driver_Box_Screen(cube_output);
lidar.Flag = Environment_Driver_Cube_Line(lidar, cube_output);
% Additional cuboids... (similar blocks omitted for brevity)
% Room walls intersection--------------------------------------------------
cube.scale = [roomX, roomY, roomZ];
cube.Location = [0, 0, roomZ/2];
cube.Rotation = [0, 0, 0];
cube_output = Environment_Driver_Box_Create(cube);
lidar.Flag = Environment_Driver_Room_Line(lidar, cube_output);
hold on;
fill3([-roomX/2, roomX/2, roomX/2, -roomX/2], [roomY/2, roomY/2, -roomY/2, -roomY/2], [0,0,0,0], [1 1 1]);
fill3([-roomX/2, roomX/2, roomX/2, -roomX/2], [roomY/2, roomY/2, roomY/2, roomY/2], [roomZ, roomZ, 0,0], [1 1 1]);
fill3([roomX/2, roomX/2, roomX/2, roomX/2], [-roomY/2, roomY/2, roomY/2, -roomY/2], [roomZ, roomZ, 0,0], [1 1 1]);
scatter3(lidar.Location(1), lidar.Location(2), lidar.Location(3), 200, '.');
Function: Environment_Driver_Box_Create.m
function output = Environment_Driver_Box_Create(input)
% Compute 8 vertices of cuboid
% Points A through H (see diagram in original)
Point = zeros(8,3);
Point(1,:) = [input.scale(1)/2, -input.scale(2)/2, input.scale(3)/2]; % A
Point(2,:) = [input.scale(1)/2, input.scale(2)/2, input.scale(3)/2]; % B
Point(3,:) = [input.scale(1)/2, input.scale(2)/2, -input.scale(3)/2]; % C
Point(4,:) = [input.scale(1)/2, -input.scale(2)/2, -input.scale(3)/2]; % D
Point(5,:) = [-input.scale(1)/2, -input.scale(2)/2, input.scale(3)/2]; % E
Point(6,:) = [-input.scale(1)/2, input.scale(2)/2, input.scale(3)/2]; % F
Point(7,:) = [-input.scale(1)/2, input.scale(2)/2, -input.scale(3)/2]; % G
Point(8,:) = [-input.scale(1)/2, -input.scale(2)/2, -input.scale(3)/2]; % H
% RPY rotation matrix
a = input.Rotation(2); b = input.Rotation(3); c = input.Rotation(1);
RA = baseRotateMatrix(a,b,c);
Point = (RA * Point')' + input.Location;
output.point = Point';
% Compute plane equations for each face (order matters for normals)
output.plane(1,:) = planeEquation(Point([1 2 3 4],:)); % ABCD
output.plane(2,:) = planeEquation(Point([6 2 1 5],:)); % FBAE
output.plane(3,:) = planeEquation(Point([3 2 6 7],:)); % CBFG
output.plane(4,:) = planeEquation(Point([8 4 3 7],:)); % HDCG
output.plane(5,:) = planeEquation(Point([8 7 6 5],:)); % HGFE
output.plane(6,:) = planeEquation(Point([1 4 8 5],:)); % ADHE
% Store line segments for boundary checks
output.line(1,:) = reshape(Point([1 2 3 4],:)', 1, 12);
output.line(2,:) = reshape(Point([6 2 1 5],:)', 1, 12);
output.line(3,:) = reshape(Point([3 2 6 7],:)', 1, 12);
output.line(4,:) = reshape(Point([8 4 3 7],:)', 1, 12);
output.line(5,:) = reshape(Point([8 7 6 5],:)', 1, 12);
output.line(6,:) = reshape(Point([1 4 8 5],:)', 1, 12);
% Center points of faces
output.centerPoint(1,:) = mean(Point([1 2 3 4],:),1);
output.centerPoint(2,:) = mean(Point([6 2 1 5],:),1);
output.centerPoint(3,:) = mean(Point([3 2 6 7],:),1);
output.centerPoint(4,:) = mean(Point([8 4 3 7],:),1);
output.centerPoint(5,:) = mean(Point([8 7 6 5],:),1);
output.centerPoint(6,:) = mean(Point([1 4 8 5],:),1);
end
function plane = planeEquation(pts)
% pts: 4x3 matrix of face corners
p1 = pts(2,:) - pts(1,:);
p2 = pts(2,:) - pts(3,:);
normal = cross(p1, p2);
normal = normal / norm(normal);
d = -dot(pts(1,:), normal);
plane = [normal, d];
end
Function: Environment_Driver_Box_Screen.m
function Environment_Driver_Box_Screen(input)
point = input.point;
fill3(point(1,[1 2 3 4]), point(2,[1 2 3 4]), point(3,[1 2 3 4]), 1);
fill3(point(1,[1 4 8 5]), point(2,[1 4 8 5]), point(3,[1 4 8 5]), 1);
fill3(point(1,[8 7 6 5]), point(2,[8 7 6 5]), point(3,[8 7 6 5]), 1);
fill3(point(1,[6 7 3 2]), point(2,[6 7 3 2]), point(3,[6 7 3 2]), 1);
fill3(point(1,[1 2 6 5]), point(2,[1 2 6 5]), point(3,[1 2 6 5]), 1);
fill3(point(1,[3 4 8 7]), point(2,[3 4 8 7]), point(3,[3 4 8 7]), 1);
end
Function: Environment_Driver_Cube_Line.m
function output = Environment_Driver_Cube_Line(lidar, cube)
% Compute intersections of rays with a cuboid
intersectionPoints = zeros(5000, 3);
pointCount = 0;
hold on;
for i = 1:lidar.laserCount
if lidar.Flag(i) == 0
continue;
end
minDist = 1e6;
bestPoint = [0 0 0];
found = 0;
for j = 1:6
% Skip if ray is pointing away from the plane
centerVec = cube.centerPoint(j,:) - lidar.Location;
angle = acos(dot(centerVec, lidar.Directions(i,:)) / (norm(centerVec)*norm(lidar.Directions(i,:))));
if angle >= pi/2
continue;
end
% Compute intersection with plane
denom = abs(dot(cube.plane(j,1:3), lidar.Directions(i,:)));
numer = abs(dot(cube.plane(j,1:3), lidar.Location) + cube.plane(j,4));
if denom == 0
continue;
end
t = numer / denom;
point = lidar.Location + lidar.Directions(i,:) * t;
% Check if point is inside face boundaries
% Extract face edges
edges = cube.line(j,:);
p1 = edges(1:3); p2 = edges(4:6); p3 = edges(7:9); p4 = edges(10:12);
L1 = norm(p1 - p2);
L2 = norm(p2 - p3);
d1 = norm(cross(point-p1, point-p2)) / norm(p2-p1);
d2 = norm(cross(point-p2, point-p3)) / norm(p3-p2);
d3 = norm(cross(point-p3, point-p4)) / norm(p4-p3);
d4 = norm(cross(point-p4, point-p1)) / norm(p1-p4);
if d1 > L2 || d2 > L1 || d3 > L2 || d4 > L1
continue;
end
% Check if point lies on plane (tolerance 5 units)
if abs(dot(cube.plane(j,1:3), point) + cube.plane(j,4)) > 5
continue;
end
% Keep closest point
dist = norm(point - lidar.Location);
if dist < minDist
minDist = dist;
bestPoint = point;
found = 1;
end
end
if found
pointCount = pointCount + 1;
intersectionPoints(pointCount,:) = bestPoint;
lidar.Flag(i) = 0;
end
end
scatter3(intersectionPoints(:,1), intersectionPoints(:,2), intersectionPoints(:,3), 'r', '.');
output = lidar.Flag;
end
Function: Environment_Driver_Room_Line.m
function output = Environment_Driver_Room_Line(lidar, cube)
% Compute intersections with room walls (only three walls: right, front, ground)
intersectionPoints = zeros(5000, 3);
pointCount = 0;
hold on;
for i = 1:lidar.laserCount
if lidar.Flag(i) == 0
continue;
end
minDist = 1e6;
bestPoint = [0 0 0];
found = 0;
for j = 1:6
% Only consider walls 1, 3, 4 (right, front, ground) — adjust indices as needed
if j == 2 || j == 5 || j == 6
continue;
end
% Same logic as Environment_Driver_Cube_Line
centerVec = cube.centerPoint(j,:) - lidar.Location;
angle = acos(dot(centerVec, lidar.Directions(i,:)) / (norm(centerVec)*norm(lidar.Directions(i,:))));
if angle >= pi/2
continue;
end
denom = abs(dot(cube.plane(j,1:3), lidar.Directions(i,:)));
numer = abs(dot(cube.plane(j,1:3), lidar.Location) + cube.plane(j,4));
if denom == 0
continue;
end
t = numer / denom;
point = lidar.Location + lidar.Directions(i,:) * t;
edges = cube.line(j,:);
p1 = edges(1:3); p2 = edges(4:6); p3 = edges(7:9); p4 = edges(10:12);
L1 = norm(p1 - p2);
L2 = norm(p2 - p3);
d1 = norm(cross(point-p1, point-p2)) / norm(p2-p1);
d2 = norm(cross(point-p2, point-p3)) / norm(p3-p2);
d3 = norm(cross(point-p3, point-p4)) / norm(p4-p3);
d4 = norm(cross(point-p4, point-p1)) / norm(p1-p4);
if d1 > L2 || d2 > L1 || d3 > L2 || d4 > L1
continue;
end
if abs(dot(cube.plane(j,1:3), point) + cube.plane(j,4)) > 5
continue;
end
dist = norm(point - lidar.Location);
if dist < minDist
minDist = dist;
bestPoint = point;
found = 1;
end
end
if found
pointCount = pointCount + 1;
intersectionPoints(pointCount,:) = bestPoint;
lidar.Flag(i) = 0;
end
end
scatter3(intersectionPoints(:,1), intersectionPoints(:,2), intersectionPoints(:,3), 'r', '.');
output = lidar.Flag;
end
Function: baseRotateMatrix.m
function RA = baseRotateMatrix(a, b, c)
% RPY rotation matrix: a=roll, b=pitch, c=yaw (angles in degrees)
RA = zeros(3,3);
RA(1,1) = cosd(a)*cosd(b);
RA(2,1) = cosd(a)*sind(b);
RA(3,1) = -sind(a);
RA(1,2) = sind(c)*sind(a)*cosd(b) - cosd(c)*sind(b);
RA(2,2) = sind(c)*sind(a)*sind(b) + cosd(c)*cosd(b);
RA(3,2) = sind(c)*cosd(a);
RA(1,3) = cosd(c)*sind(a)*cosd(b) + sind(c)*sind(b);
RA(2,3) = cosd(c)*sind(a)*sind(b) - sind(c)*cosd(b);
RA(3,3) = cosd(c)*cosd(a);
end
Reference Formulas
- Intersection of line and plane (CSDN article)
If you found this helpful, a like would be appreciated!